Steven OhEmail: oh.steven [at] fuji.waseda.jp I am an incoming CS PhD student at UChicago, advised by Prof. Haozhi Qi. I am currently finishing my undergraduate studies in Mechanical Engineering at Waseda University, where I conduct research with Prof. Tetsuya Ogata and Prof. Shigeki Sugano. Previously, I was a visiting scholar at CMU working with Prof. Deepak Pathak, a robotics research intern at OMRON SINIC X, advised by Dr. Masashi Hamaya, and a visiting scholar at Imperial College London, advised by Dr. Dandan Zhang. LinkedIn / X / Google Scholar / |

|
News
|
ResearchI am interested in how robotic systems can remain robust during dexterous, contact-rich interactions. I also enjoy working on full-stack robotic systems spanning teleoperation, control, and learning for robust and scalable deployment. |
|
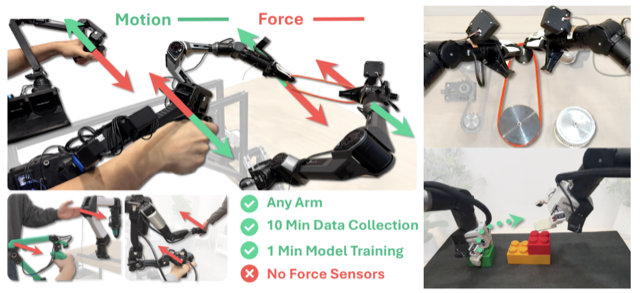
FACTR 2: Learning External Force Sensing for Commodity Robot Arms Improves Policy LearningRSS 2026 Dexterous Manipulation Workshop (Spotlight)
Contact-rich manipulation requires force sensitivity, but many robot arms lack dedicated force sensors due to their high cost. We present Neural External Torque Estimation (NEXT), a data-driven method that estimates external joint torques without needing any dedicated force sensors. NEXT trains in 1 minute from only 10 minutes of free-motion data, yet achieves estimates comparable to dedicated joint-torque sensors. NEXT enables force-feedback teleoperation on low-cost arms and improves policy learning through Force-Informed Re-Sampling Training (FIRST), which re-samples the training batch distribution to emphasize critical task phases during behavior cloning. Across five long-horizon tasks, FIRST outperforms prior force-aware policies by over 17% in task progress. Together, NEXT and FIRST bring force-aware teleoperation and policy learning to off-the-shelf robots without additional sensing hardware. |

|
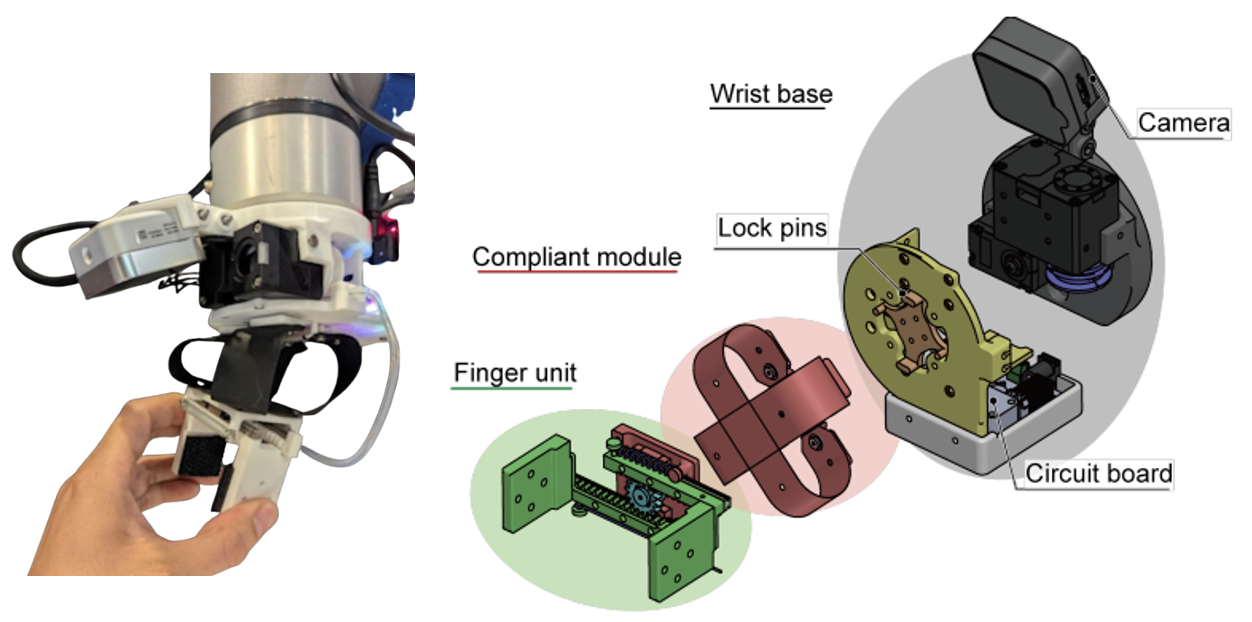
A uSkin Fingertip with a Tactile Fingernail for Contact-Rich Dexterous ManipulationICRA 2026 Dexterity with Multifingered Hands Workshop (Spotlight)
Best Poster Award 🏆
We present a tactile robotic fingertip that extends a conventional uSkin fingertip with a sensorized fingernail. While soft fingertip tactile sensing is effective for grasping and contact monitoring, fingernails enable interactions that require edge engagement, thin-gap access, scraping, and concentrated force application. To extend tactile sensing to this regime, our design adds a rigid fingernail with 6D force-torque sensing while preserving dense tactile sensing on the compliant finger pad. We evaluate the proposed design through contact force and localization experiments across multiple interaction directions. We further demonstrate its benefit in an imitation-learning card-manipulation task and several real-world nail-assisted manipulation behaviors. These results suggest that sensorized fingernails can expand the capabilities of tactile robotic hands beyond conventional fingertip-pad interactions. |
|
A Flexible Wrist with Anisotropic and Selectable Stiffness for Robust Contact-rich ManipulationIEEE Robotics and Automation Letters (RA-L), 2026
CoRL 2025 Open Hardware Workshop
Contact-rich manipulation tasks in unstructured environments pose significant robustness challenges for robot learning, where unexpected collisions can cause damage and hinder policy acquisition. Existing flexible end-effectors face fundamental limitations: they either provide a limited deformation range, lack directional stiffness control, or require complex actuation systems that compromise practicality. This study introduces CLAW (Compliant Leaf-spring Anisotropic flexible Wrist), a novel flexible wrist mechanism that addresses these limitations through a simple yet effective design using two orthogonal leaf springs and rotary joints with a locking mechanism. CLAW provides large 6-degree-of-freedom deformation (40 mm lateral, 20 mm vertical), and mode-switchable anisotropic stiffness across three discrete locking modes, while maintaining lightweight construction (330 g) at low cost (~$550). Experimental evaluations using imitation learning demonstrate that CLAW achieves 76% success rate in benchmark peg-insertion tasks, outperforming both the Fin Ray gripper (43%) and rigid gripper alternatives (36%). CLAW successfully handles diverse contact-rich scenarios, including precision assembly with tight tolerances and delicate object manipulation, demonstrating its potential to enable more robust execution of contact-rich manipulation under learned policies. |
|
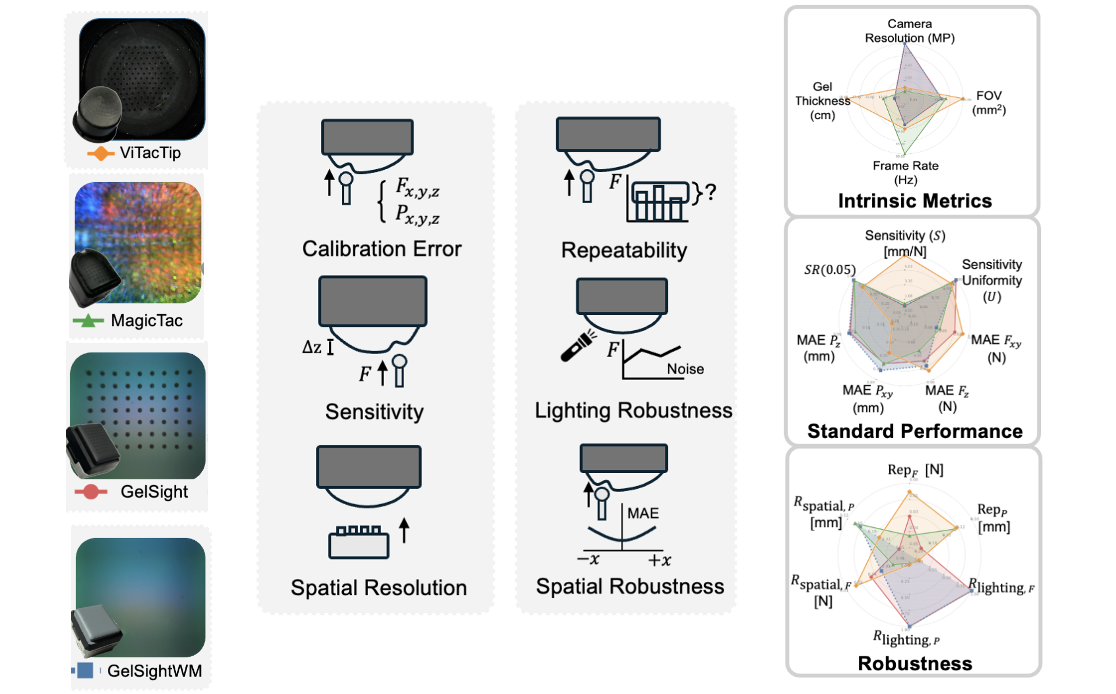
TacEva: A Performance Evaluation Framework for Vision-Based Tactile SensorsAdvanced Intelligent Systems (AISY), 2026
Vision-based tactile sensors (VBTSs) are widely used in robotic tasks because of the high spatial resolution they offer and their relatively low manufacturing costs. However, variations in their sensing mechanisms, structural dimensions, and other parameters lead to significant performance disparities between VBTSs currently in use. This makes it challenging to optimize VBTSs for specific tasks, as both the initial choice and subsequent fine-tuning are hindered by the lack of standardized metrics. To address this issue, we present TacEva, a comprehensive evaluation framework for the quantitative analysis of VBTS performance. We define a set of performance metrics that capture and quantify the key characteristics displayed in typical application scenarios. For each metric, we designed an experimental pipeline that provides a structured procedure for performance quantification. We then applied this evaluation approach to multiple VBTSs with distinct sensing mechanisms. The results show that the proposed framework yields a thorough evaluation of each design, and provides quantitative indicators for each performance dimension. This enables researchers to pre-select the most appropriate VBTS on a task-by-task basis, and also offers performance-guided insights for the optimization of VBTS design. |
|
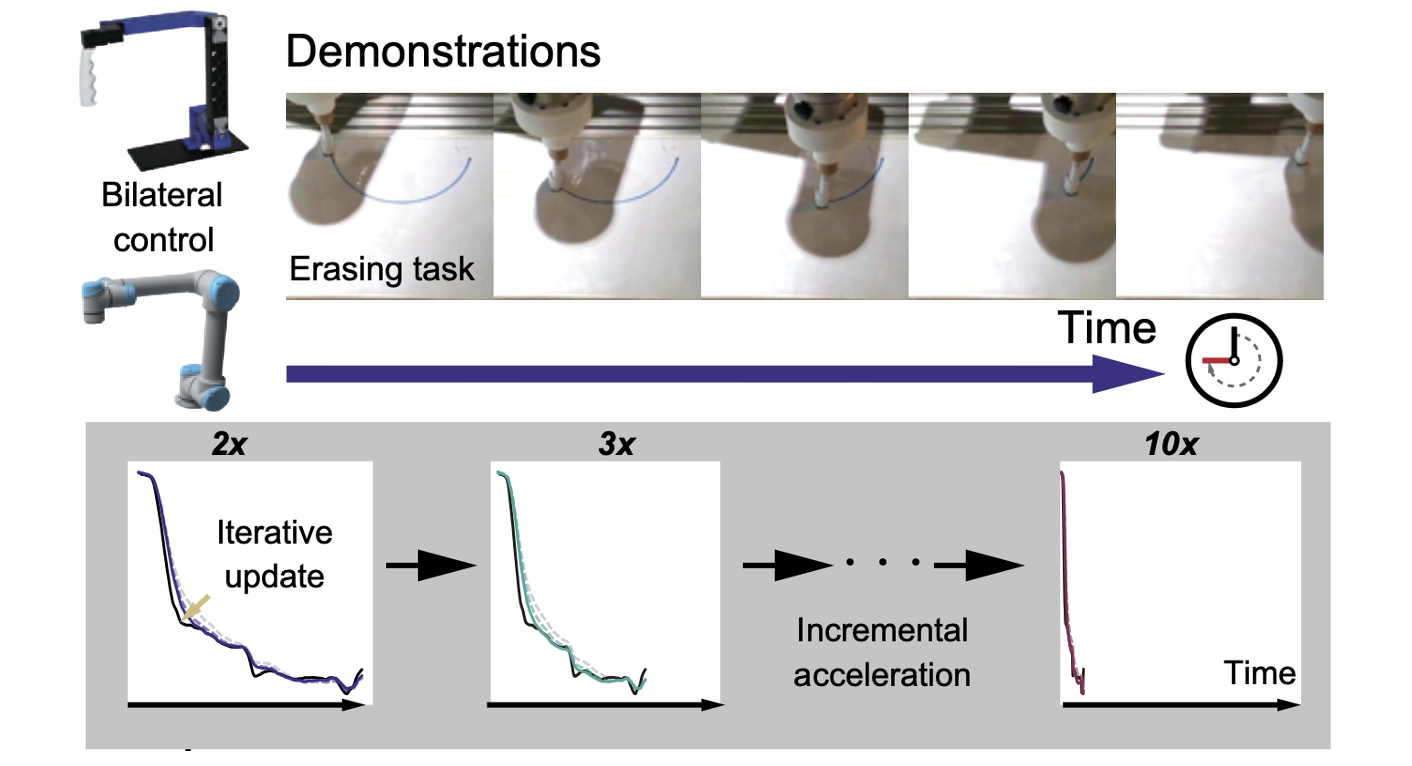
Refinement of Accelerated Demonstrations via Incremental Iterative Reference Learning Control for Fast Contact-Rich Imitation Learning
arxiv
/
Fast execution of contact-rich manipulation is critical for practical deployment, yet providing fast demonstrations for imitation learning (IL) remains challenging: humans cannot demonstrate at high speed, and naively accelerating demonstrations alters contact dynamics and induces large tracking errors. We present a method to autonomously refine time-accelerated demonstrations by repurposing Iterative Reference Learning Control (IRLC) to iteratively update the reference trajectory from observed tracking errors. However, applying IRLC directly at high speed tends to produce larger early-iteration errors and less stable transients. To address this issue, we propose Incremental Iterative Reference Learning Control (I2RLC), which gradually increases the speed while updating the reference, yielding high-fidelity trajectories. We validate on real-robot whiteboard erasing and peg-in-hole tasks using a teleoperation setup with a compliance-controlled follower and a 3D-printed haptic leader. Both IRLC and I2RLC achieve up to 10x faster demonstrations with reduced tracking error; moreover, I2RLC improves spatial similarity to the original trajectories by 22.5% on average over IRLC across three tasks and multiple speeds (3x-10x). We then use the refined trajectories to train IL policies; the resulting policies execute faster than the demonstrations and achieve 100% success rates in the peg-in-hole task at both seen and unseen positions, with I2RLC-trained policies exhibiting lower contact forces than those trained on IRLC-refined demonstrations. These results indicate that gradual speed scheduling coupled with reference adaptation provides a practical path to fast, contact-rich IL. |
Projects |

|
ServiceConference Reviewer: ICRA 2026 and IROS 2026 |